


온라인 원격 QUBE 서보2 실험
QLabs Controls
제어시스템
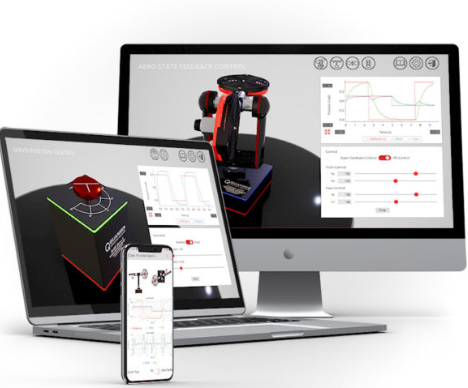
QLabs Controls는 가상 하드웨어와의 상호 작용을 통해 신뢰할 수 있고 학문적으로 적합하며 충실도가 높은 실험실 환경을 제공 할 수있는 확장 가능한 플랫폼입니다.
QLabs Controls는 Quanser 물리적 플랜트를 기반으로하며 모델링, 속도 및 위치 제어, 항공 우주 제어, 강사 리소스 및 학생 액세스를 관리하고 진행 상황을 모니터링하는 도구와 같은 주제를 다루는 포괄적 인 커리큘럼과 함께 제공됩니다.
QLabs Controls는 12 개월 구독으로 제공되며 Windows, macOS, iOS 및 Android에서 실행되며 플랫폼을 통합하기 위해 기관의 IT 인프라 나 리소스가 필요하지 않습니다.
제품군

개요
QLabs Controls는 기존 또는 온라인 제어 시스템 과정을 보완하는 가상 실험실 활동 모음입니다. 가상 하드웨어 랩은 Quanser QUBE-Servo 2 및 Quanser AERO 시스템을 기반으로 하며 실제 및 가상 플랜트를 결합하여 강의 및 실습 활동을 풍부하게하고 수업 기반 또는 온라인 과정에서 참여 및 학생의 학습 결과를 높일 수 있습니다.
특징
* 신뢰할 수 있고 학문적으로 적절한 경험
* 충실한 대화식 가상 랩 실험
* Windows, macOS, iOS 및 Android에서 사용 가능
* 전체 평가 질문 및 실험실 보고를 포함한 포괄적인 커리큘럼
* 액세스를 관리하고 학생의 진행 상황을 모니터링하기위한 강사 리소스 및 도구
* 유연한 12 개월 구독
* IT 인프라나 리소스가 필요하지 않습니다
실습 내용
QUBE- 서보 2 모듈
DC 모터
모델링
* 실험적인 DC 모터 모델링
* 첫 번째 원칙 모델과 실제 하드웨어
* TF의 시간 상수 및 이득의 중요성
* DC 모터의 비선형 동작
위치 제어
* 비례 위치 제어
* 미분 제어
* 이론 및 실제 제어 구현
속도 제어
* 비례 속도 제어
* 정상 상태 오류
* 적분 게인의 마법
* 노이즈 고려 사항
* 저역 통과 필터링 및 제어 고려 사항
리드 제어
* 리드 / 랙 보상기 설계
* 보드 플롯
안정성 분석
* 안정적, 한계 안정성 및 불안정한 시스템
* 극으로부터의 안정성 분석
* BBO (Bounded-Input Bounded-Output) 안정성
파라미터 식별
* 모터 파라미터의 실험적 식별
* 모터 전달 기능 확보
* 모델링되지 않은 역학
정상 상태 오류
* 단계 및 램프 입력으로 인한 정상 상태 오류 평가
* 시스템 유형
* 모터 위치 제어
* 비례 적분 미분 (PID) 제어
Pendulum
관성 모멘트
* 관성 모멘트 찾기
진자 모델링
* 첫 번째 원리에서 회전 진자 모델링
* 선형화
* 상태 공간 모델링
크레인 제어
* 상태 피드백 제어
* 극 위치
* 고차 시스템을위한 제어 설계
진자 균형 제어
* 선형 2 차 조정기를 사용하여 최적의 제어
* Bryson 's rule
Quanser AERO 모듈
정성적 PID 제어
모델링
* 간단한 항공 우주 시스템을 조정하는 정성적 PID
게인 스케쥴링
* 비선형 역학
* 비선형 제어
* 게인 스케줄링
* 일체형 와인드업
헬리콥터의 상태 피드백 및 PID 제어
* 복잡한 결합 항공 우주 시스템의 PID 제어
* 상태 공간 표현
* 상태 피드백 제어
하프 쿼드 콥터의 최적 제어
* 상태 피드백 제어
* LQR 설계
* Bryson의 규칙
실습 내용
| 커리큘럼 모듈 | 15 개 |
| 실습 시간 | 32 시간 |
| 정기 구독 기간 | 12 개월 |
| 시트 | 300개 이상 |
| 강의 자료 | 포함 |
| 분석 도구 | 포함 |
| 하드웨어 할인 | QBE-Servo 2 또는 Quanser AERO 구매 시 20% 할인 |