


로봇 실험 실습장비
2 DOF ROBOT
제품 개요
로봇 공학의 기본 원리 소개
2 DOF 로봇 모듈은 학생들에게 로봇의 기본 및 중간 원리를 소개하는 데 이상적입니다. 이를 사용하여 제조 라인에
사용되는 픽앤 플레이스 로봇과 같은 실제 제어 과제를 시연 할 수 있습니다.
2 DOF 로봇 모듈은 2 개의 로터리 서보베이스 유닛에 연결됩니다. 이 실험을 통해 학생들은 정역학 및 역 운동학
및 작업 공간 제어와 같은 개념을 학습합니다.
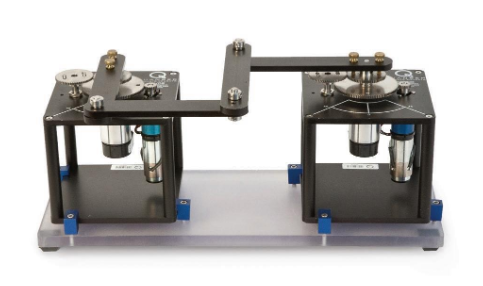
2 DOF 로봇 모듈은 고정 된 거리에 장착 된 2 개의 로터리 서보베이스 유닛에 연결됩니다. 로터리 서보베이스 유닛
에 2 개의 서보 모터가 고정 된 거리에 장착되고 4 개의 바 연결 시스템을 제어합니다 : 2 개의 무전원 암을 통해 연
결된 2 개의 전동 암. 시스템은 평면형이며 2 개의 작동 식 및 3 개의 작동되지 않은 회전 조인트가 있습니다.
2 DOF 로봇 실험의 목표는 4 바 링키지 엔드 이펙터의 XY 위치를 조작하는 것입니다. 이러한 시스템은 특이점을
가진 다른 병렬 메커니즘의 제어에서 발생하는 운동 학적 문제와 유사합니다.
2 DOF 로봇 모듈은 학생들에게 로봇의 기본 및 중간 원리를 소개하는 데 이상적입니다. 이를 사용하여 제조 라인에
사용되는 픽앤 플레이스 로봇과 같은 실제 제어 과제를 시연 할 수 있습니다.
2 DOF 로봇 모듈은 2 개의 로터리 서보베이스 유닛에 연결됩니다. 이 실험을 통해 학생들은 정역학 및 역 운동학
및 작업 공간 제어와 같은 개념을 학습합니다.
2 DOF 로봇 모듈은 고정 된 거리에 장착 된 2 개의 로터리 서보베이스 유닛에 연결됩니다. 로터리 서보베이스 유닛
에 2 개의 서보 모터가 고정 된 거리에 장착되고 4 개의 바 연결 시스템을 제어합니다 : 2 개의 무전원 암을 통해 연
결된 2 개의 전동 암. 시스템은 평면형이며 2 개의 작동 식 및 3 개의 작동되지 않은 회전 조인트가 있습니다.
2 DOF 로봇 실험의 목표는 4 바 링키지 엔드 이펙터의 XY 위치를 조작하는 것입니다. 이러한 시스템은 특이점을
가진 다른 병렬 메커니즘의 제어에서 발생하는 운동 학적 문제와 유사합니다.
특징 및 혜택
2 DOF 로봇 모듈이 로터리 서보베이스 유닛에 쉽게 부착됩니다
4 바 정밀 제작 알루미늄 링키지 시스템
추가 실험을 위해 2 DOF Inverted Pendulum 모듈을 장착 할 수 있습니다 (별도 판매).
4 바 정밀 제작 알루미늄 링키지 시스템
추가 실험을 위해 2 DOF Inverted Pendulum 모듈을 장착 할 수 있습니다 (별도 판매).
최적 구성
Simulink의 경우
1. MATLAB® / Simulink® 용 QUARC® 애드온
2. 로터리 서보베이스 유닛 2 개
3. Quanser VoltPAQ-X2 선형 전압 증폭기
4. 다음 DAQ 디바이스 중 하나 :
퀀저 Q2-USB
퀀저 Q8-USB
Quanser QPIDe
1. MATLAB® / Simulink® 용 QUARC® 애드온
2. 로터리 서보베이스 유닛 2 개
3. Quanser VoltPAQ-X2 선형 전압 증폭기
4. 다음 DAQ 디바이스 중 하나 :
퀀저 Q2-USB
퀀저 Q8-USB
Quanser QPIDe
실습 내용
모델링 주제 제어 주제
전달 함수 표현 PD
운동학
전달 함수 표현 PD
운동학
제품 사양
2 DOF 로봇 전체 치수 * (L x W x H) | 40cm x 30cm x 20cm |
2 DOF 로봇 총 질량 * | 4.0 키로그램 |
4 바 링크 모듈의 질량 | 0.335 킬로그램 |
단일 링크의 질량 | 0.065 킬로그램 |
링크 길이 | 0.127m |
코 그에 대한 관성 모멘트 링크 | 8.74 x 10-5 kg.m² |
피벗에 대한 관성 모멘트 링크 | 4.41 x 10-4 kg.m² |