


가상 원격 항공 우주 제어 실험
QLabs Virtual Quanser AERO
원격 브랜디드 학부 항공 우주 및 제어 과정을위한 가상 플랫폼
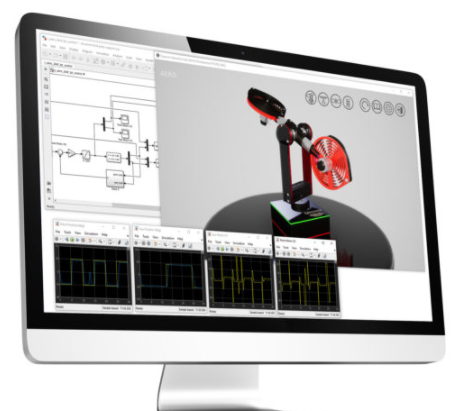
QLabs Virtual Quanser AERO는 Quanser AERO 시스템 의 완벽하게 계측되고 동적으로 정확한 가상 트윈입니다 . 물리적 하드웨어와 동일한 방식으로 작동하며 MATLAB® / Simulink® 및 기타 개발 환경을 사용하여 측정 및 제어 할 수 있습니다.
QLabs Virtual Quanser AERO는 기존 실험실에서 강의 및 활동을 풍부하게하거나 신뢰할 수있는 실제 모델 기반 실험실 경험을 원거리 및 혼합 항공 우주 및 제어 시스템 과정으로 가져올 수 있습니다.
QLabs Virtual Quanser AERO는 12 개월 다중 시트 구독으로 제공됩니다. 이 플랫폼은 모델링, 시스템 식별, 자세 및 속도 제어, PID 제어, 게인 스케줄링, 상태 피드백 제어, 결합 역학 및 칼만 필터를 포함한 개념을 다루는 물리적 Quanser AERO 커리큘럼과 호환됩니다.
QLabs Virtual Quanser AERO는 기존 실험실에서 강의 및 활동을 풍부하게하거나 신뢰할 수있는 실제 모델 기반 실험실 경험을 원거리 및 혼합 항공 우주 및 제어 시스템 과정으로 가져올 수 있습니다.
QLabs Virtual Quanser AERO는 12 개월 다중 시트 구독으로 제공됩니다. 이 플랫폼은 모델링, 시스템 식별, 자세 및 속도 제어, PID 제어, 게인 스케줄링, 상태 피드백 제어, 결합 역학 및 칼만 필터를 포함한 개념을 다루는 물리적 Quanser AERO 커리큘럼과 호환됩니다.
개요
실제 Quanser AERO 와 동일하게 가상 시스템은 1 DOF 자세, 2 DOF 헬리콥터 또는 하프 쿼드 로터 실험을 위해 재구성 할 수있는 듀얼 로터 헬리콥터 모델입니다. 로터리 엔코더는 프로펠러 DC 모터의 각도 위치를 측정하고 모터의 속도는 소프트웨어 기반 타코미터를 통해 측정됩니다.
특징
실제 실험실 장비를 사용하는 것과 동일한 충실도의 신뢰할 수있는 실험실 경험
12 개월 다중 시트 구독
Matlab® / Simulink®를 통해 시스템 매개 변수에 대한 전체 액세스
1 DOF 태도, 2 DOF 헬리콥터 및 하프 쿼드 로터 구성에 대한 포괄적인 커리큘럼
12 개월 다중 시트 구독
Matlab® / Simulink®를 통해 시스템 매개 변수에 대한 전체 액세스
1 DOF 태도, 2 DOF 헬리콥터 및 하프 쿼드 로터 구성에 대한 포괄적인 커리큘럼
실험 실습 코스웨어
ABET에 맞춘 강사 및 학생용 워크 북은 다음 주제를 다루는 전체 실습 실습을 포함합니다.
모델링 및 제어 설계 예제가 포함 된 실험실 가이드 :
하드웨어 통합
단일 프로펠러 속도 제어
극 위치 상태 피드백 균형 제어
1 DOF 자세 제어 구성
PID 제어
IMU 소개
전달 함수를 사용한 모델링 및 모델 검증
시스템 식별
일정 확보
2 DOF 헬리콥터 구성
모델링
선형 상태 공간 표현
상태 피드백 제어
결합 역학
Half-quadrotor 구성
모델링
간단한 요 제어
칼만 필터
모델링 및 제어 설계 예제가 포함 된 실험실 가이드 :
하드웨어 통합
단일 프로펠러 속도 제어
극 위치 상태 피드백 균형 제어
1 DOF 자세 제어 구성
PID 제어
IMU 소개
전달 함수를 사용한 모델링 및 모델 검증
시스템 식별
일정 확보
2 DOF 헬리콥터 구성
모델링
선형 상태 공간 표현
상태 피드백 제어
결합 역학
Half-quadrotor 구성
모델링
간단한 요 제어
칼만 필터
제품 상세 사양
| 앱 다운로드 및 구독 관리 액세스 | Quanser 아카데믹 포털 |
| 앱 OS 호환성 | MS Windows 10 64 비트 및 MATLAB 2019a 이상 |
| 필수 소프트웨어 | MATLAB 2019a 이상 (포함되지 않음) |
| 권장 시스템 요구 사항 |
비디오 카드 : Intel HD 5000 또는 동급 DX11 GPU Intel Iris Pro 5200 또는 동급 프로세서 : Core i3-3225 3.3GHz 또는 동급 메모리 : 4GM RAM |